北理工研究团队在脑机协同控制技术与脑控智能车辆方面取得重要进展
发布时间:2022-05-29脑-控智能车辆(Brain-Controlled Vehicle, BCV)通过脑机接口,实现了大脑对车辆的直接控制(包括远程控制),对残疾人和健康人具有重要的实用价值。
北京理工大学研究团队为了提高现有脑-控智能车辆的性能,降低脑-控智能车辆对驾驶员的工作负荷,提出了一种全新的脑机协同控制技术并将其应用于发展脑-控智能车辆。
该脑机协同控制框架由具有概率输出模型的脑-机接口、基于自适应模糊逻辑的接口模型和模型预测控制(Model PredictiveControl, MPC)共享控制器组成。具有概率输出模型的BCI可以以概率形式输出所有命令,而不是一次输出特定的单个命令。基于自适应模糊逻辑的接口可以根据车辆状态和道路信息将概率转换为车辆输入信号(包括车辆加速度和方向盘转角增量)。MPC共享控制器可以保证脑控驾驶员的控制权限,在保证安全的前提下减少驾驶员的工作量。在此基础上,搭建了脑-控智能车辆的实验平台,并完成了性能测试。
近日社区分享一篇毕教授研究团队在提高脑-控智能车辆性能方面所做的研究。
脑-控智能车辆(机器人)通过从大脑信号中解码人类意图,帮助人控制(包括远程控制)车辆(机器人)。为了提高现有脑-控智能车辆的性能,降低脑-控智能车辆对驾驶员产生的工作负荷,北京理工大学机械与车辆学院毕路拯教授团队创建了一种全新的脑机协同控制框架并将其应用于脑控智能车辆,在脑机协同控制与脑控智能车辆方面取得重要进展。该项研究成果作为长文以《A Novel Control Framework of Brain-Controlled Vehicle Based on FuzzyLogic and Model Predictive Control》(DOI:10.1109/TITS.2022.3177635)为题,发表在智能车辆与交通领域国际顶级期刊《IEEE Transactions on Intelligent Transportation Systems》。论文第一作者为其团队博士研究生史浩男。
研究人员通过研究发现,在脑-控智能车辆的人在环内实验中,使用提出的脑机协同控制框架相比于现有方法,在系统任务完成率保证的情况下,对不同的任务,性能指标有着显著的提升。从客观角度(非控命令的占比)和主观角度(调查问卷)两个角度上,证明了新的控制框架中驾驶员的介入程度更低,工作负荷更小。
脑机协同控制框架
提出的脑机协同控制框架如图1所示。控制框架主要包括概率化脑机接口模块、自适应模糊控制接口和MPC辅助控制器模块组成。驾驶员首先根据车辆的状态和周围环境的信息做出控制决策,输出的脑电信号给到具有概率输出模型的BCI可以以概率形式输出所有命令,而不是一次输出某个命令。基于自适应模糊逻辑的接口可以将这些概率转换为车辆的输入信号,即车辆的加速度和转向角的增量。MPC共享控制器可以在保证安全的前提下,保证脑控驾驶员的最大控制权限。此外,当驾驶员不控制车辆时,MPC可以帮助驾驶员驾驶。

图1 脑机协同控制框架
图2是搭建的实验平台在进行实验时的场景。

图2 实验场景
实验分析
研究人员对所提出的脑机协同控制框架和现有方法在侧向误差等多个指标面进行了对比分析。
研究人员让受试者在使用了新的脑机协同控制框架和现有方法两种方式下,进行了不同任务目的地的在线控制,下图为控制轨迹,经过对比,结果表明,该控制框架在系统性能提高方面是有效的。
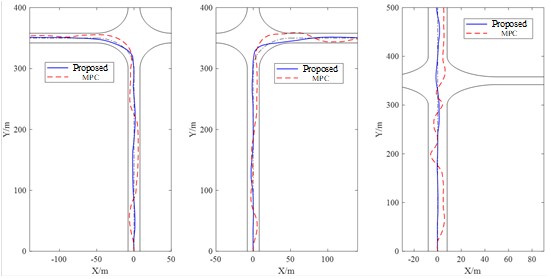
图3 一次任务完成轨迹
研究人员对所提出的脑机协同控制框架在各方面的性能进行了比较,比较结果如图4所示。结果证明,提出的控制框架优于现有方法。
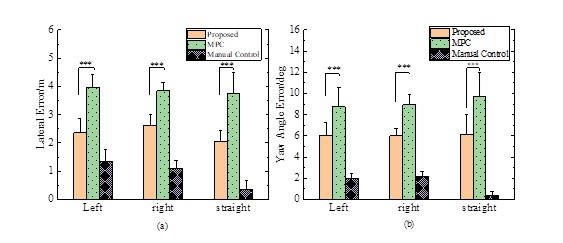
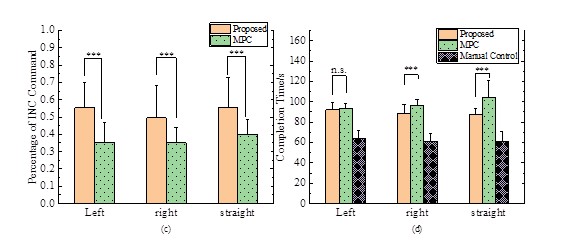
图4 路口选择实验的各项性能指标:(a)侧向误差,(b)横摆角误差, (c)非控命令占比,(b)完成任务时间
除此之外,研究人员还对用户进行了NASA-TLX问卷调查,调查结果如表1所示。结果表明,受试者对与提出的控制框架体验优于仅用MPC控制框架。

总结
毕教授研究团队针对脑-控智能车辆,提出的由概率化脑机接口、模糊逻辑接口和模型预测控制器组成的脑机协同控制框架,在保证系统安全的前提下权衡用户的意图和自主控制模式。该控制系统明显提高了脑-控智能车辆系统性能,对未来脑机协同控制技术与脑-控智能车辆的发展具有重要的科学和应用价值。
来源:脑机接口社区

