北理工研制机械狗全地形自适应,无需额外视觉感知,可在复杂地形中如履平地
发布时间:2022-05-29最近几年,四足机械狗逐渐成为科技界和市场上的“新宠”,奔跑、爬楼梯、前进、后退、甚至翻跟头,每次它们的出现都会掀起一片热潮。

与轮式、履带式机器人相比,四足机器人拥有更好的平衡性、灵活性、适应性,不过要想让四足机器人走得更远,研究在不平坦地形上的腿结运动稳定性非常重要。
最近,北京理工大学的研究人员设计了一种具有并行对称腿结构的四足机械狗,并应用了一种自适应算法,使机械狗无需额外的感知或视觉支持就能快速估计全地形信息,在草地和岩石等复杂地形上如履平地。
▍四足机械狗的诞生三部曲
1、四足机械狗诞生的第一步:考虑什么样的腿结构能让机械狗走得稳
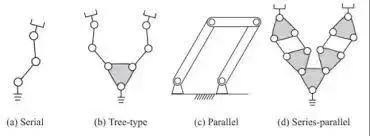
动态运动初步由地面反作用力(GRF)决定,可以通过腿结构和执行器来表征,研究人员对不同的腿结构进行了数值模拟,采用了能够产生更大的地面反作用力(GRF)的对称并联腿结构。
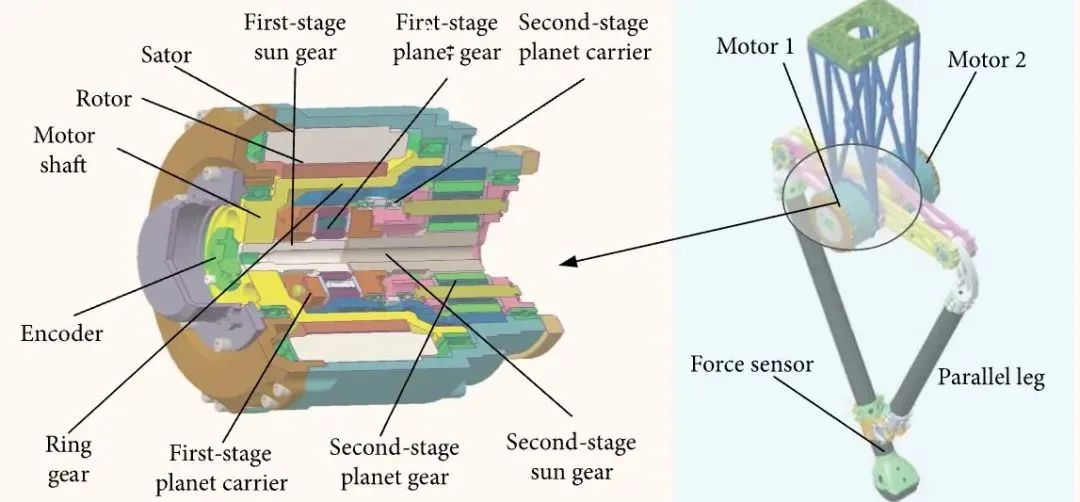
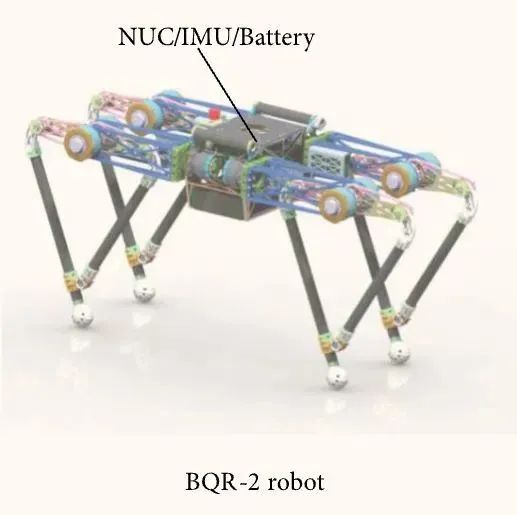
机械狗的腿由强度高、重量轻的碳纤维制成,再配备高精度编码器、六轴惯性测量单元、每只脚下的三维力传感器,控制器、驱动器和电池都位于机器人的中心。这样下来,机械狗整体质量约为 40 kg,腿长为 0.6 m。
2、接下来,就要用控制算法让机械狗学会自己走路
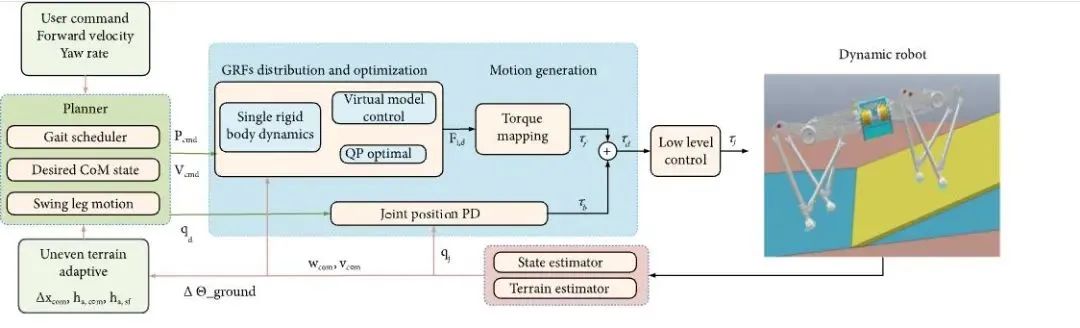
研究人员利用了二次规划(QP)优化的虚拟模型控制(VMC)算法,该方法可利用虚拟力“驱使”机械狗达到期望的运动状态,这些虚拟力通过Jacobian矩阵计算得到期望的关节力矩,作为控制关节的输入,让机械狗达到和虚拟力相同的运动效果。
3、光会走路还不行,此刻的机械狗就像一个没学会走路的孩子跌跌撞撞,容易摔跤
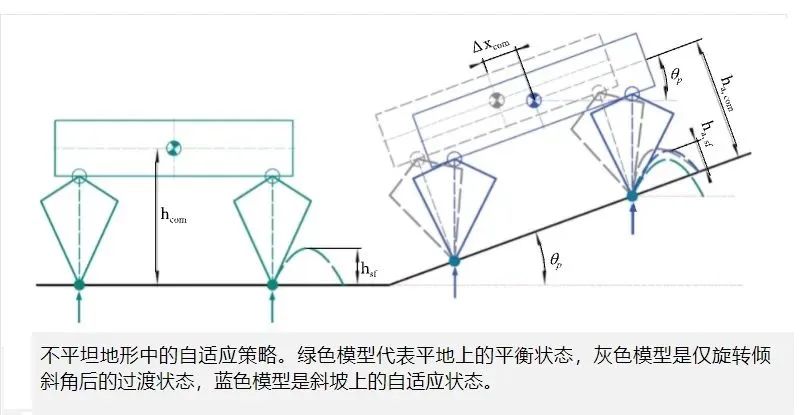
研究人员提出了一种快速估计全地形信息的方法,让机械狗能在复杂地形下自适应调整平衡、身体状态和摆腿运动。该方法基于广义最小二乘法,通过融合身体、腿部和接触信息来估计地形参数,脚步坐标是通过融合来自 IMU 的躯干方向信息和关节编码器信息获得的,无需额外感知或视觉支持。
▍实地遛‘狗’
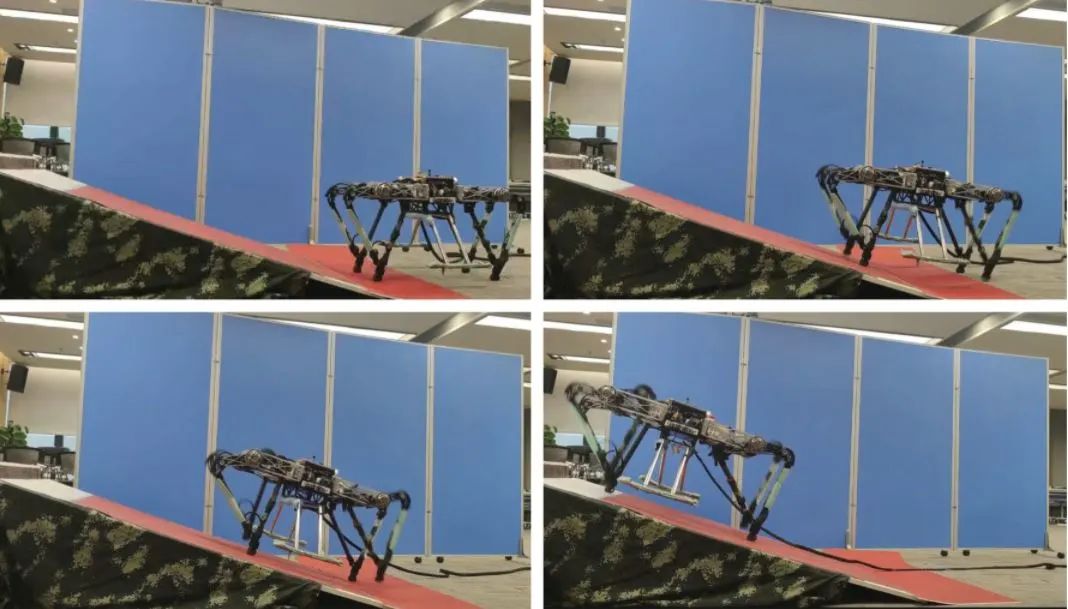
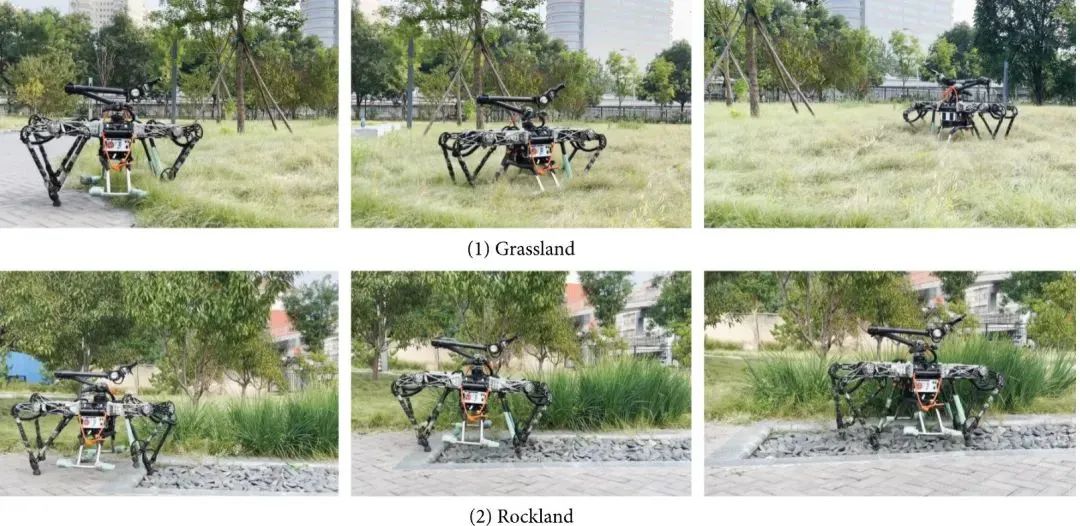
为了验证机械狗的真实运动能力,研究人员进行了三个室外实验,实地遛‘狗’
机械狗分别上了斜坡、草地和岩石,并保持稳定的小跑步态,因为水平的 GRF 值很小,机械狗在斜坡上也没有脚滑。

研究人员还给机械狗装了一条机械臂,不过没有用来抓取物体,只是作为质量干扰物来验证机械狗的稳定运动能力。结果表明,机械狗在不平坦地形上具有较强的自适应能力,还能够抵抗一定的外部冲击。
这篇研究发表在Cyborg and Bionic Systems 期刊中,标题为“Design and Dynamic Locomotion Control of Quadruped Robot withPerception-Less Terrain Adaptation”(无感知地形适应四足机器人的设计与动态运动控制)。

该机械狗目前能够进行多种动态运动和无感知地形适应,身上安装的那只机械臂也会带来无限期待,未来研究人员计划优化机械狗的高动态运动,也许有一天能看到它在草地上一边挥舞着机械臂,一边奔跑、跳跃的身影。
论文链接:https://spj.sciencemag.org/journals/cbsystems/2022/9816495/
来源:机器人大讲堂

